Ученые MIT научат беспилотные автомобили ориентироваться в сильном тумане

Обеспечение безопасного движения самоуправляемых автомобилей крайне — важное направление для их запуска в эксплуатацию. Особенно в свете недавнего летального исхода с участием беспилотного авто Uber. Наибольшую опасность любое транспортное средство представляет в условиях недостаточной освещенности и видимости, в частности в тумане. И недавно исследователи из Массачусетского технологического института разработали метод, дающий возможность лидарам (основным элементам для ориентации в пространстве) отлично «видеть» при сильном тумане.
По своей сути любой лидар представляет собой прибор, который испускает лазерный луч и на основе его отражения получает данные об окружающих объектах. При огромном количестве плюсов лидар имеет существенный недостаток: чистый воздух не мешает его работе, но что-либо увидеть сквозь плотный туман устройство не способно. Группа ученых под руководством Рамеша Раскара придумала метод, позволяющий лидарам получать сигнал, отраженный от объектов даже в очень плотном тумане.
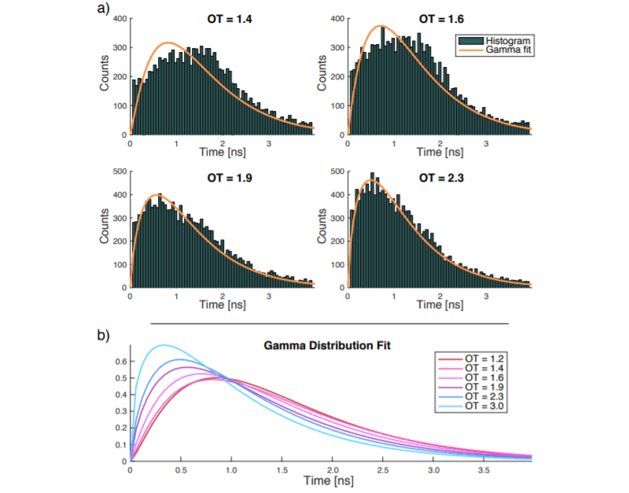
Распределение фотонов в зависимости от плотности тумана
Происходит это следующим образом: лазер испускает импульсы в область тумана, а рядом с принимающим устройством расположена специальная камера, состоящая из однофотонных детекторов. Они фиксируют время возвращения каждого фотона. Каждый зафиксированный «кадр» содержит информацию о времени получения фотона. Затем компьютерная программа строит диаграмму, в которой каждый столбец описывает количество зарегистрированных фотонов и выстраивает на основании этого данные об области расположения объектов.
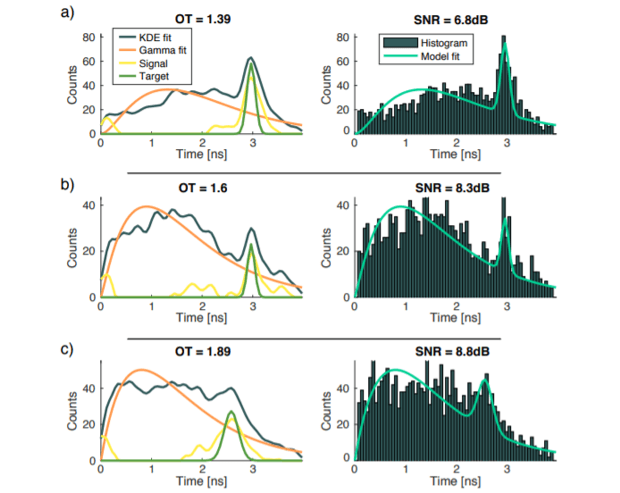
Прием сигналов от тумана и от объектов, расположенных в нем
В ходе серии экспериментов ученые протестировали свой метод в условиях искусственно созданного тумана. Выяснилось, что в то время, когда прямая видимость составляет 37 сантиметров, модифицированный лидар улавливает предметы на расстоянии в 57 сантиметров. На данный момент эксперименты продолжаются, и авторы будут и дальше улучшать технологию. В частности, основной проблемой сейчас является то, что лидар может фиксировать только лишь статичные объекты.