«Роскосмос» выделит 2,5 миллиарда рублей на создание космических роботов
Государственная корпорация «Роскосмос» собирается создать «механических космонавтов», способных работать в открытом космосе. Александр Гребенщиков, начальник лаборатории космической робототехники Центрального научно-исследовательского института машиностроения (ЦНИИмаш), рассказал изданию «Российская Газета» о планах на ближайшее будущее. По словам Гребенщикова, сейчас бы очень пригодились роботы, способные работать за пределами станции и помогать космонавтам. Помимо них нужны и роботы, умеющие «самостоятельно» обслуживать внешние поверхности станции, проводя осмотр, ремонт и обслуживание оборудования.
Наиболее универсальными, — говорит Гребенщиков, — будут роботы-аватары, они пригодятся для сложных операций на Луне и других планетах».
Он пояснил, что работа космонавтов за бортом не только очень опасна, но и затратна — каждый час, проведённый специалистом за бортом МКС, стоит от двух до четырёх миллионов долларов, поэтому разработка «аватаров» поможет в будущем снизить расходы. Кроме того, с её помощью можно будет существенно облегчить рутинную работу космонавтов, частично переложив её на плечи роботизированных помощников.
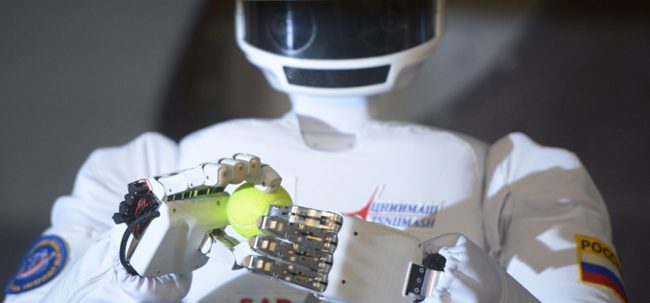
Предприятие «Андроидная техника» уже несколько лет работает над роботом-андроидом, первый прототип был изготовлен и начал проходить наземные испытания в конце 2015 года. Тесты показали, что он недурно справляется со своей ролью: работает с механическими замками, протирает иллюминаторы, проводит осмотр с помощью телекамер, переключает тумблеры и уверенно держит инструменты.
Аватары — это здорово, но и с ними будет полно проблем. Дело в том, что любой робот, дистанционно управляемый с Земли, хорош только на орбите, если же говорить о других, более серьёзных расстояниях, тут уже всё гораздо сложнее. Даже находясь на Луне, аватар или другой робот, находящийся под контролем диспетчера с Земли, будет получать команды с задержкой, что совершенно неприемлемо. Поэтому лучше всего управлять ими с меньшего расстояния, желательно находясь на орбите Луны. Ещё лучше иметь на Луне собственную базу.
В данный момент на базе прототипа SAR-401 делают робота, который предположительно уже в 2020 году отправится на МКС, где будет выполнять задачи в новом научно-энергетическом российском модуле российского сегмента станции.